
一種3D打印機(jī)Z軸升降系統(tǒng)
作者:
申請權(quán)利人:昆明理工大學(xué)
一種3D打印機(jī)Z軸升降系統(tǒng)
【申請(專利)號:CN202222193494.2;申請權(quán)利人:昆明理工大學(xué);發(fā)明設(shè)計人:袁銳波; 楊肖; 曹志鵬; 陳有錦;】
摘要:
本實用新型涉及一種3D打印機(jī)Z軸升降系統(tǒng),屬于3D打印領(lǐng)域。包括機(jī)架、升降組件、動力組件、平臺組件和調(diào)節(jié)組件,機(jī)架左右兩側(cè)均安裝有升降組件,升降組件底部安裝在機(jī)架底部的橫梁上,側(cè)部與機(jī)架側(cè)邊的豎梁連接,平臺組件與升降組件上端連接,每一側(cè)升降組件下部均固定有大同步帶輪,動力組件、調(diào)節(jié)組件固定于機(jī)架底部兩根縱梁上且調(diào)節(jié)組件位于靠近升降組件的位置,調(diào)節(jié)組件包括前后位置可調(diào)節(jié)的H輪,動力組件包括可轉(zhuǎn)動的小同步帶輪,同步帶為封閉式結(jié)構(gòu)分別依次繞過小同步帶輪、一側(cè)的大同步帶輪、H輪、另一側(cè)的大同步帶輪。本實用新型可有效減少雙Z軸轉(zhuǎn)動不同步,且調(diào)節(jié)組件可對同步帶松緊進(jìn)行快速調(diào)節(jié),保證絲桿受力合理。
主權(quán)項:
1.一種3D打印機(jī)Z軸升降系統(tǒng),其特征在于:包括機(jī)架(1)、升降組件、動力組件(2)、平臺組件(3)、和調(diào)節(jié)組件(4),機(jī)架(1)左右兩側(cè)均安裝有升降組件,升降組件底部安裝在機(jī)架(1)底部的橫梁(12)上,側(cè)部與機(jī)架(1)側(cè)邊的豎梁(11)連接,平臺組件(3)與升降組件上端連接,每一側(cè)升降組件下部均固定有大同步帶輪(15),動力組件(2)、調(diào)節(jié)組件(4)固定于機(jī)架(1)底部兩根縱梁(13)上且調(diào)節(jié)組件(4)位于靠近升降組件的位置,調(diào)節(jié)組件(4)包括前后位置可調(diào)節(jié)的H輪(43),動力組件(2)包括可轉(zhuǎn)動的小同步帶輪(24),同步帶(46)為封閉式結(jié)構(gòu)分別依次繞過小同步帶輪(24)、一側(cè)的大同步帶輪(15)、H輪(43)、另一側(cè)的大同步帶輪(15)。
要求:
1.一種3D打印機(jī)Z軸升降系統(tǒng),其特征在于:包括機(jī)架(1)、升降組件、動力組件(2)、平臺組件(3)、和調(diào)節(jié)組件(4),機(jī)架(1)左右兩側(cè)均安裝有升降組件,升降組件底部安裝在機(jī)架(1)底部的橫梁(12)上,側(cè)部與機(jī)架(1)側(cè)邊的豎梁(11)連接,平臺組件(3)與升降組件上端連接,每一側(cè)升降組件下部均固定有大同步帶輪(15),動力組件(2)、調(diào)節(jié)組件(4)固定于機(jī)架(1)底部兩根縱梁(13)上且調(diào)節(jié)組件(4)位于靠近升降組件的位置,調(diào)節(jié)組件(4)包括前后位置可調(diào)節(jié)的H輪(43),動力組件(2)包括可轉(zhuǎn)動的小同步帶輪(24),同步帶(46)為封閉式結(jié)構(gòu)分別依次繞過小同步帶輪(24)、一側(cè)的大同步帶輪(15)、H輪(43)、另一側(cè)的大同步帶輪(15)。
2.根據(jù)權(quán)利要求1所述的一種3D打印機(jī)Z軸升降系統(tǒng),其特征在于:所述升降組件包括微型導(dǎo)軌(16)、滑塊(17)、軸承支座(14)、T型絲桿(18)及絲桿螺母(19),微型導(dǎo)軌(16)固定在機(jī)架(1)兩側(cè)豎梁(11)上,滑塊(17)滑動安裝在微型導(dǎo)軌(16)上,機(jī)架(1)底部橫梁(12)兩側(cè)分別安裝有軸承支座(14),軸承支座(14)內(nèi)固定有T型絲桿(18),T型絲桿(18)上安裝絲桿螺母(19),T型絲桿(18)上靠近軸承支座(14)位置固定有大同步帶輪(15);
平臺組件(3)包括平臺(32)和安裝在平臺(32)兩側(cè)的兩個平臺固定件(31),絲桿螺母(19)固定在平臺固定件(31)頂面,平臺固定件(31)側(cè)面和滑塊(17)連接固定。
3.根據(jù)權(quán)利要求1或2所述的一種3D打印機(jī)Z軸升降系統(tǒng),其特征在于:動力組件(2)還包括固定于機(jī)架(1)底部兩根縱梁(13)中間的電機(jī)架(21),電機(jī)架(21)上固定有h輪(23)和電機(jī)(22),小同步帶輪(24)固定于電機(jī)(22)的輸出軸上,電機(jī)架(21)上靠近小同步帶輪(24)的安裝位置對稱間隔設(shè)有兩個h輪(23),h輪(23)與同步帶(46)外側(cè)接觸。
4.根據(jù)權(quán)利要求1或2所述的一種3D打印機(jī)Z軸升降系統(tǒng),其特征在于:
調(diào)節(jié)組件(4)包括調(diào)節(jié)架(41)、調(diào)節(jié)件(42)、H輪(43)、螺釘(44)、旋鈕(45),調(diào)節(jié)件(42)位于調(diào)節(jié)架(41)內(nèi)部空腔,調(diào)節(jié)件(42)前側(cè)固定H輪(43),調(diào)節(jié)件(42)后側(cè)與固定螺釘(44)的前端連接,螺釘(44)穿過調(diào)節(jié)架(41)后側(cè)通孔與帶內(nèi)螺紋的旋鈕(45)連接。
5.根據(jù)權(quán)利要求1所述的一種3D打印機(jī)Z軸升降系統(tǒng),其特征在于:所述機(jī)架(1)框架材料為2020歐標(biāo)鋁合金型材,型材采用角碼和螺栓螺母進(jìn)行連接。
6.根據(jù)權(quán)利要求2所述的一種3D打印機(jī)Z軸升降系統(tǒng),其特征在于:所述微型導(dǎo)軌(16)型號為國標(biāo)MGN12,滑塊(17)型號為國標(biāo)MGN12H,微型導(dǎo)軌(16)上的孔位和機(jī)架(1)兩側(cè)豎梁(11)鋁型材進(jìn)行定位和連接。
7.根據(jù)權(quán)利要求2所述的一種3D打印機(jī)Z軸升降系統(tǒng),其特征在于:軸承支座(14)型號為國標(biāo)KFL000,軸承支座(14)上的孔位和機(jī)架(1)底部橫梁(12)鋁型材進(jìn)行定位和連接。
8.根據(jù)權(quán)利要求2所述的一種3D打印機(jī)Z軸升降系統(tǒng),其特征在于:平臺固定件(31)側(cè)面四個通孔用作和滑塊(17)定位和固定。
9.根據(jù)權(quán)利要求1所述的一種3D打印機(jī)Z軸升降系統(tǒng),其特征在于:所述小同步帶輪(24)、一側(cè)的大同步帶輪(15)、H輪(43)、另一側(cè)的大同步帶輪(15)位于同一水平面上。
一種3D打印機(jī)Z軸升降系統(tǒng)
技術(shù)領(lǐng)域
本實用新型涉及一種3D打印機(jī)Z軸升降系統(tǒng),屬于3D打印技術(shù)領(lǐng)域。
背景技術(shù)
對于現(xiàn)在的桌面級3D打印機(jī),采用雙絲桿來驅(qū)動平臺的運動很廣泛,雙絲桿各自用電機(jī)驅(qū)動的方案在打印機(jī)使用中可能存在兩絲桿轉(zhuǎn)動不同步導(dǎo)致平臺傾斜的問題。同時,3D打印機(jī)長時間工作運行,會導(dǎo)致同步帶拉伸和變松,同步帶的張緊力會產(chǎn)生影響,同步帶運行時會抖動,嚴(yán)重時會跳齒,對3D打印機(jī)運行穩(wěn)定性和打印精度產(chǎn)生影響。現(xiàn)有技術(shù)中,在3D打印機(jī)工作期間無法快速對同步帶進(jìn)行調(diào)節(jié)。
實用新型內(nèi)容
為解決以上技術(shù)問題,本實用新型的目的為提供一種3D打印機(jī)雙Z軸升降系統(tǒng),可有效減少雙Z軸轉(zhuǎn)動不同步,且調(diào)節(jié)組件可對同步帶松緊進(jìn)行快速調(diào)節(jié),保證絲桿受力合理,提升打印精度。
本實用新型的技術(shù)方案是:一種3D打印機(jī)Z軸升降系統(tǒng),包括機(jī)架1、升降組件、動力組件2、平臺組件3、和調(diào)節(jié)組件4,機(jī)架1左右兩側(cè)均安裝有升降組件,升降組件底部安裝在機(jī)架1底部的橫梁12上,側(cè)部與機(jī)架1側(cè)邊的豎梁11連接,平臺組件3與升降組件上端連接,每一側(cè)升降組件下部均固定有大同步帶輪15,動力組件2、調(diào)節(jié)組件4固定于機(jī)架1底部兩根縱梁13上且調(diào)節(jié)組件4位于靠近升降組件的位置,調(diào)節(jié)組件4包括前后位置可調(diào)節(jié)的H輪43,動力組件2包括可轉(zhuǎn)動的小同步帶輪24,同步帶46為封閉式結(jié)構(gòu)分別依次繞過小同步帶輪24、一側(cè)的大同步帶輪15、H輪43、另一側(cè)的大同步帶輪15。
具體地,所述升降組件包括微型導(dǎo)軌16、滑塊17、軸承支座14、T型絲桿18及絲桿螺母19,微型導(dǎo)軌16固定在機(jī)架1兩側(cè)豎梁11上,滑塊17滑動安裝在微型導(dǎo)軌16上,機(jī)架1底部橫梁12兩側(cè)分別安裝有軸承支座14,軸承支座14內(nèi)固定有T型絲桿18,T型絲桿18上安裝絲桿螺母19,T型絲桿18上靠近軸承支座14位置固定有大同步帶輪15;
平臺組件3包括平臺32和安裝在平臺32兩側(cè)的兩個平臺固定件31,絲桿螺母19固定在平臺固定件31頂面,平臺固定件31側(cè)面和滑塊17連接固定。
具體地,動力組件2還包括固定于機(jī)架1底部兩根縱梁13中間的電機(jī)架21,電機(jī)架21上固定有h輪23和電機(jī)22,小同步帶輪24固定于電機(jī)22的輸出軸上,電機(jī)架21上靠近小同步帶輪24的安裝位置對稱間隔設(shè)有兩個h輪23,h輪23與同步帶46外側(cè)接觸。
具體地,調(diào)節(jié)組件4包括調(diào)節(jié)架41、調(diào)節(jié)件42、H輪43、螺釘44、旋鈕45,調(diào)節(jié)件42位于調(diào)節(jié)架41內(nèi)部空腔,調(diào)節(jié)件42前側(cè)固定H輪43,調(diào)節(jié)件42后側(cè)與固定螺釘44的前端連接,螺釘44穿過調(diào)節(jié)架41后側(cè)通孔與帶內(nèi)螺紋的旋鈕45連接。
優(yōu)選地,所述機(jī)架1框架材料為2020歐標(biāo)鋁合金型材,型材采用角碼和螺栓螺母進(jìn)行連接。
優(yōu)選地,所述微型導(dǎo)軌16型號為國標(biāo)MGN12,滑塊17型號為國標(biāo)MGN12H,微型導(dǎo)軌16上的孔位和機(jī)架1兩側(cè)豎梁11鋁型材進(jìn)行定位和連接。
優(yōu)選地,軸承支座型14號為國標(biāo)KFL000,軸承支座14上的孔位和機(jī)架1底部橫梁12鋁型材進(jìn)行定位和連接。
優(yōu)選地,平臺固定件31側(cè)面四個通孔用作和滑塊17定位和固定。
優(yōu)選地,所述小同步帶輪24、一側(cè)的大同步帶輪15、H輪43、另一側(cè)的大同步帶輪15位于同一水平面上。
本實用新型的有益效果是:本實用新型可有效減少雙Z軸不同步使打印機(jī)平臺使用過程傾斜導(dǎo)致打印翹邊,也可通過調(diào)節(jié)組件對同步帶松緊快速調(diào)節(jié),使同步帶張緊力達(dá)到較為合適的程度,防止同步帶工作抖動和跳齒,讓3D打印機(jī)工作穩(wěn)定性和打印精度有所提高。
附圖說明
為了更清楚地說明本申請實施例或現(xiàn)有技術(shù)中的技術(shù)方案,下面將對實施例或現(xiàn)有技術(shù)描述中所需要使用的附圖作簡單地介紹,顯而易見地,下面描述中的附圖僅僅是本申請中記載的一些實施例,對于本領(lǐng)域普通技術(shù)人員來講,在不付出創(chuàng)造性勞動的前提下,還可以根據(jù)這些附圖獲得其他的附圖。
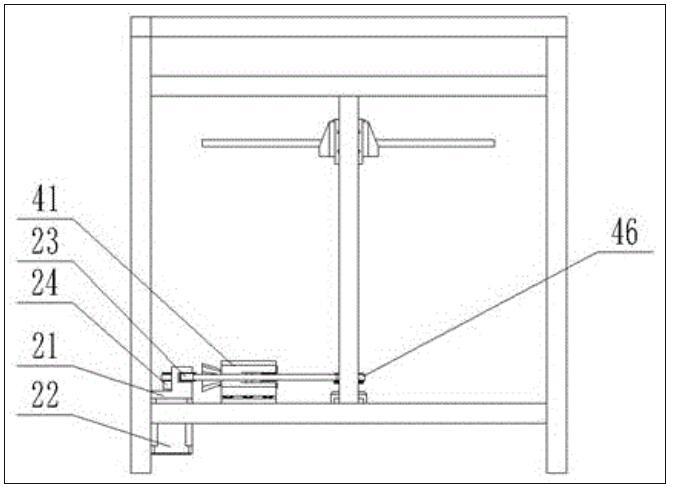
圖1為本實用新型實施例中3D打印機(jī)雙Z軸升降系統(tǒng)立體示意圖;
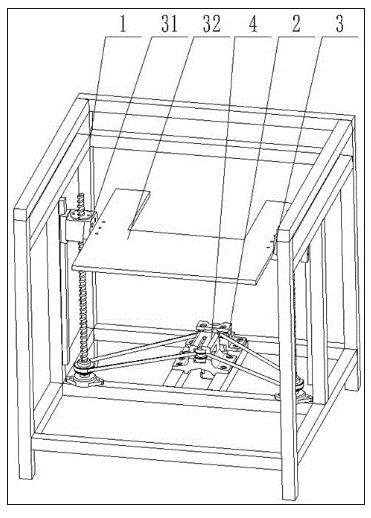
圖2為本實用新型實施例中3D打印機(jī)雙Z軸升降系統(tǒng)的機(jī)架立體示意圖;
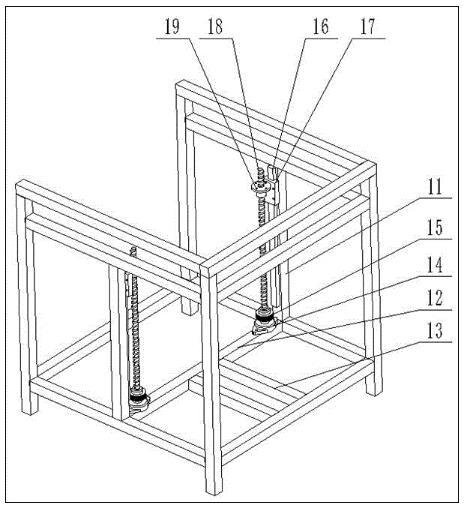
圖3為本實用新型實施例中3D打印機(jī)雙Z軸升降系統(tǒng)側(cè)視示意圖;
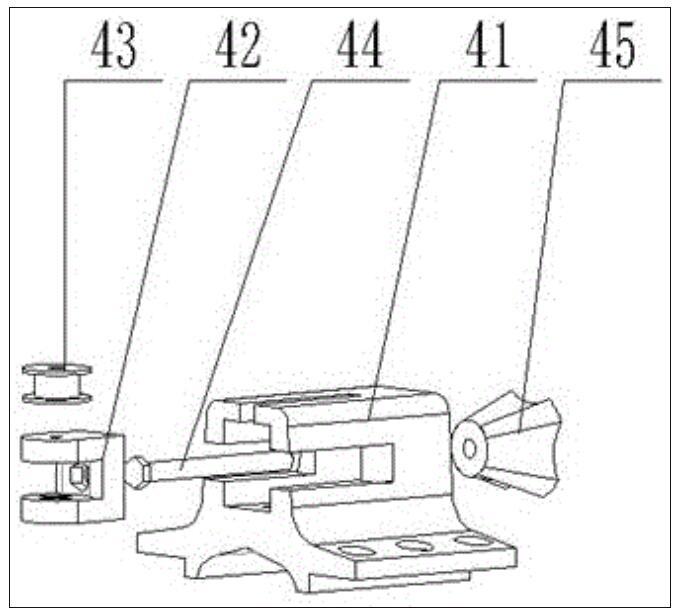
圖4為本實用新型實施例中3D打印機(jī)雙Z軸升降系統(tǒng)的同步帶傳動部分剖面示意圖;
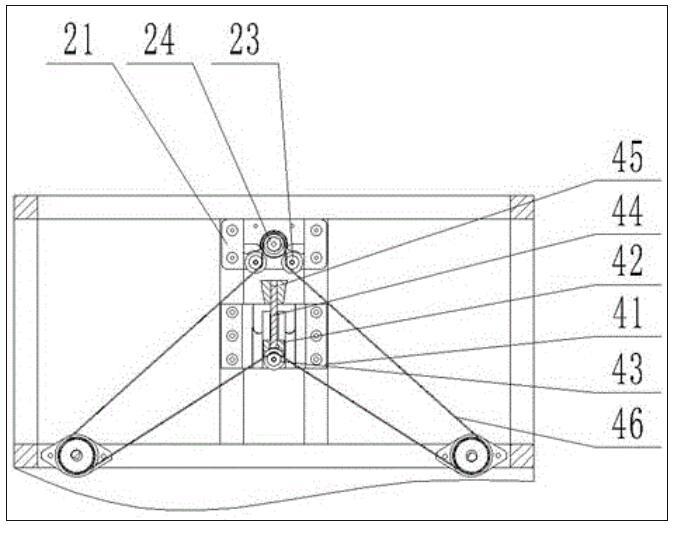
圖5 為本實用新型實施例中3D打印機(jī)雙Z軸升降系統(tǒng)的調(diào)節(jié)組件的爆炸示意圖。
附圖標(biāo)記:1-機(jī)架;11-豎梁;12-橫梁;13-縱梁;14-軸承支座;15-大同步帶輪;16-微型導(dǎo)軌;17-滑塊;18-T型絲桿;19-絲桿螺母;2-動力組件;21-電機(jī)架;22-電機(jī);23-h輪;24-小同步帶輪;3-平臺組件;31-平臺固定件;32-平臺;4-調(diào)節(jié)組件;41-調(diào)節(jié)架;42-調(diào)節(jié)件;43-H輪;44-螺釘;45-旋鈕;46-同步帶。
具體實施方式
下面將結(jié)合本實用新型實施例中的附圖,對本實用新型實施例中的技術(shù)方案進(jìn)行清楚、完整地描述,顯然,所描述的實施例僅僅是本實用新型一部分實施例,而不是全部的實施例。基于本實用新型中的實施例,本領(lǐng)域普通技術(shù)人員在沒有作出創(chuàng)造性勞動前提下所獲得的所有其它實施例,都屬于本實用新型保護(hù)的范圍。
實施例1:參照圖1-圖5,一種3D打印機(jī)Z軸升降系統(tǒng),包括機(jī)架1、升降組件、動力組件2、平臺組件3、和調(diào)節(jié)組件4,機(jī)架1左右兩側(cè)均安裝有升降組件,升降組件底部安裝在機(jī)架1底部的橫梁12上,側(cè)部與機(jī)架1側(cè)邊的豎梁11連接,平臺組件3與升降組件上端連接,每一側(cè)升降組件下部均固定有大同步帶輪15,動力組件2、調(diào)節(jié)組件4固定于機(jī)架1底部兩根縱梁13上且調(diào)節(jié)組件4位于靠近升降組件的位置,調(diào)節(jié)組件4包括前后位置可調(diào)節(jié)的H輪43,動力組件2包括可轉(zhuǎn)動的小同步帶輪24,同步帶46為封閉式結(jié)構(gòu)分別依次繞過小同步帶輪24、一側(cè)的大同步帶輪15、H輪43、另一側(cè)的大同步帶輪15。
進(jìn)一步地,所述升降組件包括微型導(dǎo)軌16、滑塊17、軸承支座14、T型絲桿18及絲桿螺母19,微型導(dǎo)軌16固定在機(jī)架1兩側(cè)豎梁11上,滑塊17滑動安裝在微型導(dǎo)軌16上,機(jī)架1底部橫梁12兩側(cè)分別安裝有軸承支座14,軸承支座14內(nèi)固定有T型絲桿18,T型絲桿18上安裝絲桿螺母19,T型絲桿18上靠近軸承支座14位置固定有大同步帶輪15,微型導(dǎo)軌16和滑塊17可對平臺32移動進(jìn)行導(dǎo)向和增強(qiáng)移動穩(wěn)定性;
平臺組件3包括平臺32和安裝在平臺32兩側(cè)的兩個平臺固定件31,絲桿螺母19固定在平臺固定件31頂面,平臺固定件31側(cè)面和滑塊17連接固定。
通過兩根T型絲桿18同步轉(zhuǎn)動可以讓兩側(cè)絲桿螺母19同步豎直方向移動,由此帶動兩個平臺固定件31同步移動,讓平臺32豎直方向上穩(wěn)定移動。
進(jìn)一步地,動力組件2還包括固定于機(jī)架1底部兩根縱梁13中間的電機(jī)架21,電機(jī)架21上固定有h輪23和電機(jī)22,小同步帶輪24固定于電機(jī)22的輸出軸上,電機(jī)架21上靠近小同步帶輪24的安裝位置對稱間隔設(shè)有兩個h輪23,h輪23與同步帶46外側(cè)接觸。小同步帶輪24和同步帶46接觸,電機(jī)架21上兩個h輪23可以限制同步帶46空間位置,讓小同步帶輪24兩側(cè)同步帶46之間保持平行,使同步帶46和小同步帶輪24的接觸面積增大,從而增大同步帶46和小同步帶輪24接觸的包角,增強(qiáng)傳動穩(wěn)定性。
進(jìn)一步地,調(diào)節(jié)組件4包括調(diào)節(jié)架41、調(diào)節(jié)件42、H輪43、螺釘44、旋鈕45,調(diào)節(jié)件42位于調(diào)節(jié)架41內(nèi)部空腔,調(diào)節(jié)件42前側(cè)固定H輪43,調(diào)節(jié)件42后側(cè)與固定螺釘44的前端連接,螺釘44穿過調(diào)節(jié)架41后側(cè)通孔與帶內(nèi)螺紋的旋鈕45連接。旋鈕45和調(diào)節(jié)架41位置固定,調(diào)節(jié)件42位置不固定,旋鈕45旋轉(zhuǎn)可轉(zhuǎn)化為螺釘44的直線運動,進(jìn)一步讓調(diào)節(jié)件42在調(diào)節(jié)架41內(nèi)部空腔作直線運動。調(diào)節(jié)件42的直線運動即可帶動H輪43對同步帶46松緊作調(diào)節(jié)。
進(jìn)一步地,所述機(jī)架1框架材料為2020歐標(biāo)鋁合金型材,型材采用角碼和螺栓螺母進(jìn)行連接,結(jié)構(gòu)簡單,安裝方便且牢固。所述微型導(dǎo)軌16型號為國標(biāo)MGN12,滑塊17型號為國標(biāo)MGN12H,微型導(dǎo)軌16上的孔位和機(jī)架1兩側(cè)豎梁11鋁型材進(jìn)行定位和連接。軸承支座型14號為國標(biāo)KFL000,軸承支座14上的孔位和機(jī)架1底部橫梁12鋁型材進(jìn)行定位和連接。結(jié)構(gòu)簡單,安裝方便且牢固。
進(jìn)一步地,平臺固定件31側(cè)面四個通孔用作和滑塊17定位和固定,連接牢靠。
進(jìn)一步地,所述小同步帶輪24、一側(cè)的大同步帶輪15、H輪43、另一側(cè)的大同步帶輪15位于同一水平面上,調(diào)節(jié)效果更好、更穩(wěn)定。
本實用新型的工作原理是:動力組件2和調(diào)節(jié)組件4安裝在機(jī)架兩根縱梁13之間,根據(jù)同步帶46長度,動力組件2和調(diào)節(jié)組件4安裝位置在縱梁13方向可調(diào)節(jié),調(diào)節(jié)到合適位置,電機(jī)架21和調(diào)節(jié)架41根據(jù)各自孔位和機(jī)架1縱梁13進(jìn)行定位和固定。同步帶46為封閉環(huán),與小同步帶輪24、兩個h輪23、兩個大同步帶輪15和H輪43直接接觸,且離地高度保持統(tǒng)一。調(diào)節(jié)組件4中,旋鈕45手動轉(zhuǎn)動時,因旋鈕45位置固定,螺釘44會作直線運動,螺釘44和調(diào)節(jié)件42連接,故旋鈕45轉(zhuǎn)動時調(diào)節(jié)件42會隨螺釘44直線運動,帶動調(diào)節(jié)件42上的H輪43運動。同步帶46安裝時穿過H輪43和調(diào)節(jié)件42之間,H輪43會將同步帶46向縱梁13靠近電機(jī)22方向拉緊,調(diào)節(jié)件42帶動H輪43在調(diào)節(jié)架41內(nèi)部空腔移動,可使同步帶46松緊在一定程度調(diào)節(jié)。電機(jī)22轉(zhuǎn)動帶動小同步帶輪24轉(zhuǎn)動,小同步帶輪24帶動同步帶46,同步帶46帶動兩個大同步帶輪15同步轉(zhuǎn)動,進(jìn)一步實現(xiàn)平臺組件3平穩(wěn)運動,讓打印精度提高。
以上所述的實施例僅是對本實用新型的優(yōu)選方式進(jìn)行描述,并非對本實用新型的范圍進(jìn)行限定,在不脫離本實用新型設(shè)計精神的前提下,本領(lǐng)域普通技術(shù)人員對本實用新型的技術(shù)方案做出的各種變形和改進(jìn),均應(yīng)落入本實用新型權(quán)利要求書確定的保護(hù)范圍內(nèi)。
相關(guān)信息

© 2022 寧波鄞州蓋奇同步帶輪有限公司 版權(quán)所有 浙ICP備09102982號-2  浙公網(wǎng)安備33021202003319號 網(wǎng)站建設(shè):中企動力 寧波 SEO
浙公網(wǎng)安備33021202003319號 網(wǎng)站建設(shè):中企動力 寧波 SEO
咨詢
E-mail
二維碼
手機(jī)瀏覽

- TOP